The first time a robot reaches for a mug in a home, the task can look almost embarrassingly simple. The mug is right there. A person would pick it up without thinking, shift it around a dish towel, avoid the charging cable, and set it down wherever the table has room. The person would notice the handle, the weight, the way the ceramic might be slippery near the sink, and the fact that the mug is too close to the edge. Most of that happens below language. The hand just goes.
For a robot, that small reach is a chain of uncertain guesses. It has to understand where the mug is, where the table is, what parts of the scene are hidden, whether the mug is empty or heavy, whether the towel will slide, whether the cable can snag, whether the arm has enough clearance, whether the gripper can make contact without pushing the object away, and what to do if the first grasp fails. The room does not announce these facts. The robot has to infer them from cameras, depth sensors, tactile signals, memory, and whatever training experience its system carries.
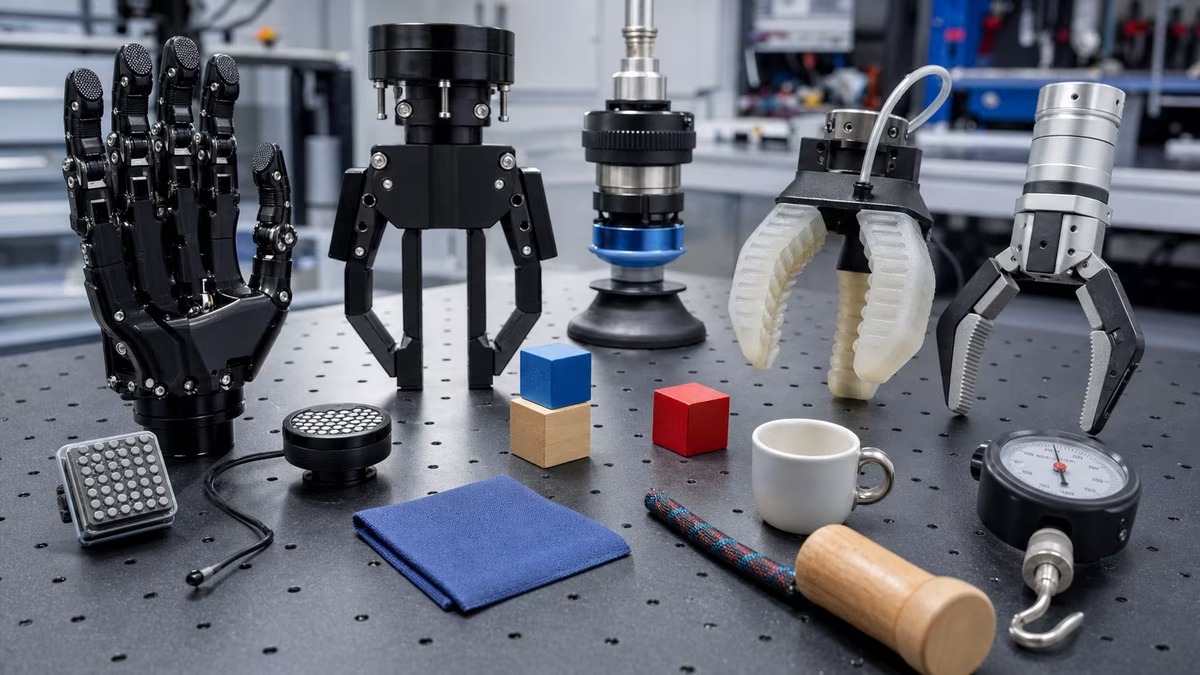
This is why Robot Hands and Dexterous Manipulation is not only about clever fingers. The hand matters, but the hard part is the whole moment around the hand. A home robot that can wave, point, and close a gripper in the air has not yet proven that it can live with mugs, socks, mail, toys, bowls, cables, blankets, and the slightly sticky jar that someone forgot on the counter.
The object is never just one object
A person sees a mug and brings years of experience to it. Mugs have handles. Some are heavy. Some are fragile. Some are hot. Some have liquid inside. Some are taller than expected. Some have a handle too small for a finger. The same word covers thousands of shapes, materials, weights, finishes, and failure modes. A robot needs a way to handle that variety without treating every object as a new invention.
Home objects are especially troublesome because they are not designed for robots. Warehouses can standardize bins, totes, labels, shelf heights, and picking zones. Homes standardize almost nothing. A dish towel folds into unpredictable shapes. A sock collapses. A plastic bag reflects light and shifts under airflow. A remote control has buttons, curves, and a low profile. A set of keys is small, shiny, tangled, and easy to push instead of grasp. A child’s block is simple until it sits partly under the couch.
The robot needs to decide where a useful grasp might be. That decision depends on geometry, but not only geometry. A cylinder can be held around the side. A mug might be better held by the handle, unless the handle is turned away. A soft object may need a pinch, a scoop, or support from below. A thin flat object may need to be nudged to an edge before it can be lifted. A fragile object may need a slower approach and gentler closure. The shape suggests possible actions, but the material and context decide which actions are wise.
Seeing the grasp is not the same as making it
Perception gives the robot a proposal, not a guarantee. A camera may see the top of an object but not the side facing away. A depth sensor may struggle with glossy, transparent, black, or thin objects. A towel can hide the real edge of the table. A cable can look like a shadow. The object may shift between the moment the robot plans and the moment the gripper arrives.
This connects directly to Robot Perception in Messy Homes . A robot cannot grasp what it does not understand well enough to approach. It also cannot wait for perfect certainty, because perfect certainty rarely arrives in a real room. The system has to act under partial knowledge while keeping the consequences small.
Good grasping systems therefore behave a little like careful people. They approach slowly near uncertainty. They leave room for correction. They use the table, the edge, or the other side of the gripper as part of the plan. They watch what changes during contact. If the mug slides instead of lifting, that is information. If the towel moves with the object, that is information too. The contact is not only the end of the plan. It is a new sensor event.

Contact makes the world honest
Vision can be fooled. Contact is harder to fake, but it arrives late. By the time the robot feels the object, it may already be pushing it, tipping it, or trapping something underneath. Tactile sensing is valuable because it tells the robot whether the grasp is actually happening, not just whether the plan looked good from a camera.
Tactile feedback can be simple or sophisticated. A gripper may know only that motor current rose as the fingers closed. A richer hand may sense pressure distribution, slip, contact location, or force direction. Even modest feedback can help. If the object begins to slip, the robot can tighten slightly or lower it before it falls. If the gripper closes fully without resistance, the robot can infer that it missed. If contact happens earlier than expected, the robot can stop before driving through the scene.
The challenge is that more sensing also creates more decisions. A robot has to interpret the signal quickly and safely. A person can feel a glass start to slide and adjust grip without describing the event. A robot needs software that turns that signal into a useful reaction. This is why manipulation is not solved by buying a fancier hand alone. The hand, sensors, control loop, planner, and failure behavior all have to agree.
The table is part of the hand
Humans constantly use the environment while manipulating objects. We slide a card to the edge of a table before lifting it. We steady a bowl with one hand while scooping with another. We drag a towel toward us instead of pinching one corner perfectly. We rotate a mug so the handle is reachable. We lean an object against the counter while changing grip.
Robots that only imagine clean midair grasps miss much of real home manipulation. Sometimes the smartest move is not to pick the object straight up. It is to reposition it, clear nearby clutter, push it gently against a stable surface, or change the robot’s body position. The home becomes part of the manipulation system.
This is also where small design choices matter. A simple two-finger gripper may be enough for many rigid objects but weak with cloth. A suction cup may work well on flat packaging but fail on porous or curved materials. A multi-finger hand may offer more options but cost more, break more easily, and require more control. A mobile base may need to approach the table from a different angle before the arm can reach. The useful system is rarely the one with the most impressive part in isolation. It is the one whose parts fit the task.
Failure recovery separates demo from deployment
Most robot grasping demos show success. Real deployment is shaped by failure. The robot misses, bumps, drops, drags, pinches the wrong corner, blocks its own camera, or picks up two objects at once. A practical home robot needs a calm second move.
Recovery starts with recognizing that something went wrong. Did the object leave the table? Is it in the gripper? Did it fall? Did it move to a new pose? Is the scene now riskier because a glass is near the edge or a cable is wrapped around a wheel? The robot must update the world after the failed attempt. Repeating the same grasp blindly is how small mistakes become annoying or unsafe.
Good recovery often means backing up, looking again, asking for help, or switching tactics. A robot might say that it cannot safely lift the object from its current position. It might ask a person to move a towel, turn a handle outward, or place the item in a bin. That can feel less futuristic than a silent autonomous success, but it may be the more honest product. Robot Failure Recovery makes the same point at the system level: autonomy is not only what the robot does when the first plan works. It is what happens next.
Homes reward narrow promises
The dream of a general home robot encourages people to ask whether the machine can pick up anything. A better question is what it can pick up reliably, in what rooms, from what surfaces, with what lighting, with what kinds of clutter, and with what fallback when the answer is no. Narrow promises are not embarrassing. They are how physical systems become useful.
A robot that can clear a small set of objects from a table into a tray may be more valuable than a robot that sometimes performs a spectacular grasp and sometimes gets stuck on a towel. A robot that can carry a medication pouch from a counter to a person may matter more than one that can fold laundry once in a controlled demo. The home does not reward broad claims. It rewards dependable help in repeated moments.
That is the quiet lesson of robot grasping in real homes. Manipulation is not a magic trick at the end of a robot arm. It is perception, approach, contact, material understanding, body positioning, recovery, and trust folded into one ordinary reach. When a robot finally picks up the mug cleanly, it has not solved a mug. It has survived a little negotiation with the physical world.