
Robot calibration is the quiet agreement that lets a machine believe its own body.
A camera sees a cup. A depth sensor estimates its distance. An arm controller thinks the gripper is ten centimeters away. A mobile base believes it is square with the table. A map says the table edge begins at a particular line. The robot acts only when all of those statements can be placed in the same physical story. Calibration is the work of making that story coherent enough for motion.
It is easy to treat calibration as a setup chore, something done before the interesting work begins. In real robots, calibration is closer to grammar. It gives the system a shared language for cameras, joints, wheels, maps, grippers, tools, chargers, safety zones, and time. When the grammar is wrong, the robot may still speak fluently in software logs while moving badly in the room.
This guide belongs beside Robot Perception because perception depends on measurements that line up. It also belongs beside Robot Maintenance and Reliability because calibration does not stay perfect after the first day. A robot gets bumped, heats up, wears down, ships to another site, swaps tools, updates maps, and keeps learning that geometry is not a one-time fact.
The Robot Lives In Coordinate Frames
A coordinate frame is a way of saying where something is and which direction it faces. A camera has a frame. A robot arm base has a frame. Each joint has a frame. A gripper has a frame. A mobile robot has a body frame. A map has a world frame. A charger has a docking frame. A work surface may have its own task frame. The robot needs transformations between those frames so that an observation in one frame can become an action in another.
The phrase sounds abstract until a gripper misses. Suppose a camera mounted near the wrist sees a handle. The grasp planner chooses a point in the camera image and estimates a pose in three-dimensional space. The controller then needs to move the gripper to that pose. If the system does not know exactly where the camera sits relative to the wrist, the planned grasp may be clean in the camera frame and wrong in the gripper frame. The robot did not fail because it lacked ambition. It failed because two parts of the machine disagreed about the same centimeter.
Mobile robots face the same problem at room scale. A lidar scan may place an obstacle in front of the robot, while the map frame says the robot is slightly somewhere else. Wheel odometry may drift a little during a turn. A depth camera may point lower than its saved mounting angle. None of these errors has to be dramatic. Robotics is full of failures caused by ordinary small disagreements that compound as motion continues.
Small Errors Become Physical Consequences
Software often tolerates vague boundaries. A search result can be approximately relevant. A generated answer can be polished but imperfect. A robot touching the world has less room for imprecision. A five millimeter error can be the difference between grasping a bottle and pushing it away. A two degree camera tilt can shift a floor estimate far enough to make a threshold look safer than it is. A stale docking pose can turn a routine charge into a repeated failure.
The consequences depend on the task. A floor-cleaning robot may survive coarse localization because its work envelope allows wide margins and slow motion. A warehouse arm placing cartons into a tote may need better object pose estimates but can still retry some misses. A robot inserting a connector, opening a latch, or picking a fragile object needs tighter agreement between perception, kinematics, force, and contact. Calibration quality is not an abstract score. It is a property of the task the robot is allowed to perform.
This is why Robot Demo Evaluation should include calibration questions. Was the robot freshly calibrated before the clip? Were objects placed in known positions? Did the team use fiducial markers, fixtures, or human resets? Did the same setup work after transport, after a tool change, or after a few hours of heat and vibration? A good demo can show real progress, but calibration determines whether the progress survives outside the prepared moment.
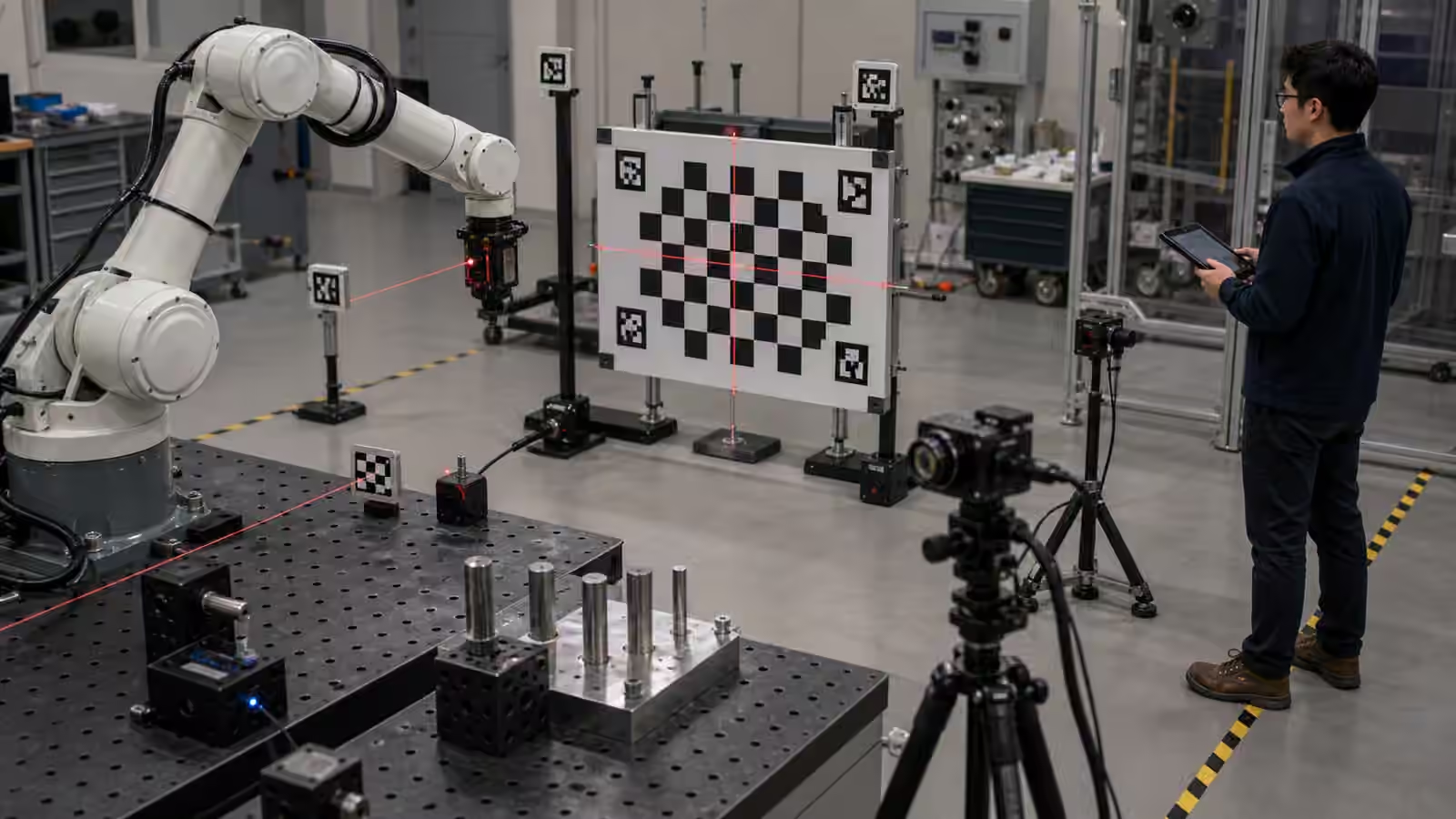
Sensor Calibration Is More Than Lens Correction
People often hear calibration and think of a checkerboard in front of a camera. That is part of the story. A camera needs intrinsic calibration so the system understands focal length, distortion, and the way pixels relate to rays in space. A depth camera needs its depth behavior checked across range, material, angle, and lighting. A lidar needs its scan aligned to the robot body. A force sensor needs offsets and scale. An IMU needs bias estimates. Wheel encoders need diameter assumptions and slip awareness. A tactile pad needs a baseline.
The harder part is often extrinsic calibration, the relationship between sensors and the robot. The system must know where each sensor is mounted and how it is oriented. If a camera bracket flexes, the saved transform may become a lie. If a lidar is remounted after service, a map can look subtly rotated. If a wrist camera is replaced without recalibrating hand-eye geometry, the robot may see objects clearly and still reach incorrectly.
Multiple sensors make the problem richer rather than simpler. A camera may see texture, a depth sensor may estimate surface geometry, lidar may track room structure, and odometry may carry motion between observations. These witnesses only help if the robot knows how to compare them. Sensor fusion without alignment becomes an argument between instruments. Sensor fusion with good calibration gives the autonomy stack a chance to treat disagreement as useful uncertainty instead of noise.
Timing Is Part Of Alignment
Calibration is not only about space. It is also about time. Robots move while they sense. A camera frame, joint reading, wheel encoder tick, lidar scan, force spike, and control command all belong to moments. If the timestamps are wrong, the robot may combine a present image with an old joint angle or a fresh command with a stale pose estimate. The geometry may be correct on paper and wrong in motion.
Latency is especially visible when robots act near people or contact. A mobile robot that updates obstacle position too slowly may brake late or move cautiously because its estimates are always behind. A robot arm using visual servoing may oscillate if the control loop reacts to old images. A teleoperated robot may feel clumsy even when the operator is skilled because sensing, command, and feedback are not aligned in time.
Good calibration practice therefore includes clock synchronization, timestamp discipline, and replay. Logs should let engineers ask what the robot believed at the moment it acted, not one cycle before or after. Robot Data Collection matters here because a dataset without trustworthy timing can make a good system look worse, or a bad system look explainable for the wrong reason.
Calibration Drifts Because Robots Are Physical
A robot fresh from the lab can be well aligned and still drift in the field. Screws loosen. Plastic flexes. Rubber wheels wear. Gripper pads compress. A camera lens gathers dust. A robot arm warms up after repeated motion. A mobile base bumps a doorway. A payload changes the way suspension sits. A work cell gets moved by a few centimeters during cleaning. A map remains on disk while the room quietly changes around it.
This drift often appears as personality before it appears as diagnosis. Operators say the robot has started missing the left side of a bin, docking on the second try, pausing near one doorway, or picking slightly too deep in a tote. Those stories deserve attention. They may point to model weakness, but they may also point to geometry that has become stale.
The maintenance habit is to test the humble causes early. Is the camera still tight? Is the calibration target still flat? Is the floor marker worn? Did the gripper finger get replaced with a slightly different part? Is the map still accurate? Is the robot localizing well from a cold start? These questions do not make the team less technical. They prevent the team from sending every field complaint straight to machine learning.
Calibration Should Be Designed Into The Workflow
A calibration process that only one engineer understands will not survive deployment. The site needs a practical rhythm. Some checks may happen at installation. Some may happen after service, transport, collision, tool change, map edit, software update, or repeated failure. Some may be automatic self-checks, while others need a technician, operator, or support team to place a target, confirm a fixture, or run a short validation route.
The process should fit the robot’s job. A warehouse fleet may use docking checks, route validation, map consistency tests, sensor-cleaning routines, and known landmarks. A manipulation cell may use precision blocks, calibration boards, force checks, grasp tests, and fixture verification. A home robot may rely on conservative self-mapping, docking landmarks, narrow task boundaries, and alerts when the environment has changed too much. The goal is not ceremonial precision. The goal is enough confidence for the action that follows.
This is also a Robot Site Readiness issue. A building that offers stable lighting, protected chargers, known routes, clear work surfaces, and repeatable handoff points makes calibration easier to preserve. A site that constantly moves markers, blocks docks, changes layouts without notice, or treats fixtures as disposable forces the robot to spend more of its intelligence recovering from avoidable disagreement.
Validation Is Different From Calibration
Calibration sets the relationship. Validation checks whether the relationship is still good enough. The distinction matters because a procedure can complete successfully while the robot remains unfit for the task. A camera can accept a calibration target and still perform poorly in the lighting where it will work. A map can load without error and still mismatch a moved shelf. An arm can report healthy joint positions and still miss because the gripper fingertip is worn.
Validation should be tied to behavior. Can the robot dock from realistic approach angles? Can it detect the obstacle types that matter at the site? Can it pick known test objects across the work surface? Can it stop at protected zones from normal operating speed? Can it relocalize after being paused or moved according to the recovery process? A validation test is useful when it resembles the robot’s actual risk, not when it merely produces a clean pass message.
The most valuable validation records become part of deployment memory. They show what the robot could do before a change and after a change. They help separate a calibration issue from a worn part, a bad map, a data problem, or a workflow mismatch. They also give teams a more honest way to describe progress: not only that the robot works, but that it works after the checks that match its job.
Good Calibration Makes Robots Seem Calm
Calibration is rarely the feature that appears in a product video. It does not look like intelligence. It looks like a robot that reaches without fuss, docks without drama, slows in the right place, treats contact as expected, and does not invent strange reasons to stop. The better the alignment, the less the user notices it.
That quietness is the point. Physical AI becomes useful when perception, planning, control, hardware, operations, and human workflows agree about the same world. Calibration is one of the disciplines that keeps that agreement alive. It is not the whole answer to reliability, and it cannot compensate for a poor task design or careless safety case. But without it, even strong models and capable hardware spend their time arguing with bad geometry.
The practical question is simple enough to keep near every robot project: when the machine says an object, person, charger, tool, or doorway is here, how do we know that here still means the same place to every part of the system? The teams that answer that question carefully build robots that fail less mysteriously and recover with better evidence when the world shifts under them.


