A robot does not move because a model decided something. It moves because motors, transmissions, brakes, bearings, sensors, controllers, cables, batteries, and heat limits all agreed to turn that decision into force.
That physical chain is easy to overlook. Cameras and large models make the robot seem intelligent. A planner makes the task seem orderly. A demo clip shows a hand closing around an object or a humanoid walking across a room. Underneath the smooth moment is a more stubborn question: can the machine create the right motion, at the right speed, with the right force, often enough, safely enough, and without damaging itself?
Actuators are the parts that turn stored energy into movement. Motion control is the discipline that tells those actuators how to behave from one instant to the next. Together they decide whether a robot reaches calmly, shudders, overshoots, overheats, drops a payload, stalls on a threshold, or stops when contact becomes risky. They are part of the same story as Robot Hands and Dexterous Manipulation , Humanoid Robots , and Robot Safety , because every one of those topics eventually becomes a question about controlled force in the world.
Actuator Choice Shapes the Robot
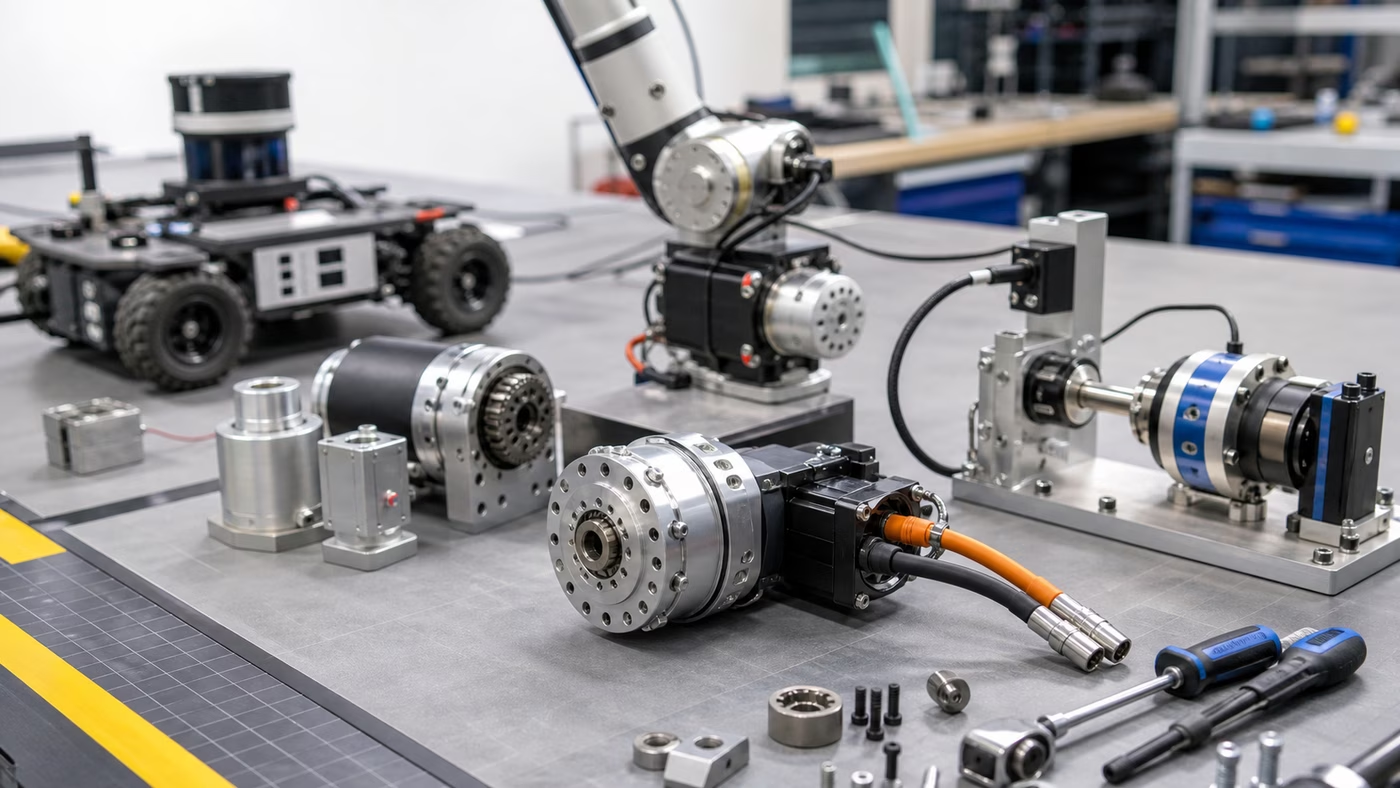
An actuator is never just a motor with a nicer name. It is a package of compromises. A small electric motor may spin quickly but need gearing to lift a load. A high-torque joint may move slowly or run hot. A direct-drive joint can feel smooth and backdrivable, but it may be larger, heavier, and more expensive than a geared alternative. A brake can hold a joint when power is removed, but it adds mass and design complexity. A compact actuator module may simplify assembly while hiding repair and thermal limits inside a sealed unit.
Those choices shape the robot long before software enters the room. A warehouse mobile robot needs drive units that can push a loaded base all shift, handle floor seams, brake predictably, and tolerate dust. A robot arm in a picking cell needs joints with enough torque, stiffness, accuracy, and duty cycle to repeat useful motion without drifting into fixtures. A humanoid needs many actuators packed into a body that is already fighting balance, battery mass, impact, and heat. The body plan is partly an actuator plan.
This is why robot capability claims should be read through hardware, not only through autonomy. A model may propose a graceful motion, but the robot still has to produce it. If the knees cannot absorb impact, the walking policy has a narrow life. If the wrist cannot sense or limit contact well, the hand becomes risky near fragile objects. If the mobile base has weak braking on a loaded slope, the navigation stack has to avoid situations the marketing video may never mention.
Torque Is Not the Same as Useful Strength
Torque is a measure of rotational force, and it appears constantly in robot hardware discussions. It matters, but it is not enough by itself. A joint can have high peak torque for a short burst and much lower continuous torque for work that lasts. A motor can produce impressive force while overheating too quickly for a real shift. A drivetrain can multiply torque while adding friction, backlash, noise, and maintenance burden. The useful question is not only how strong the actuator is at a moment. It is what it can do repeatedly under the task’s actual rhythm.
Consider a robot arm lifting totes at a workstation. The difficult part may not be one heavy lift. It may be thousands of medium lifts, with acceleration, deceleration, brief holds, small corrections, and occasional awkward reaches. A motor sized for a single dramatic movement can still be wrong for that job if it heats up, loses precision after wear, or cannot brake smoothly when the payload shifts. The same is true for a mobile robot that can cross a test floor but struggles with a route full of ramps, turns, dock approaches, and crowded stops.
Peak capability is useful for understanding margins. Continuous capability is what turns into operations. That distinction connects directly to Robot Maintenance and Reliability . Heat, bearings, belts, gear teeth, cables, seals, encoders, and brakes all carry the memory of repeated motion. Robots fail in the field not only because their intelligence was incomplete, but because ordinary motion became a mechanical workload.
Gearboxes Make Motion Possible and Imperfect
Many robot joints use gear reductions because electric motors often spin faster and weaker than a robot limb needs. Gearing trades speed for torque. It can make a compact motor lift useful loads, hold a posture, and move with authority. It can also introduce the small imperfections that motion control has to live with.
Backlash is one example. If a gear train has a tiny amount of play, the motor can move before the output joint fully responds. In a loose system, the robot may feel uncertain around direction changes or contact. Friction is another. Some transmissions resist motion even when the controller wants a gentle response. Elasticity matters too. Shafts, belts, housings, and gear teeth can twist slightly under load, making the joint behave less like a rigid mathematical hinge and more like a springy physical object.
None of this means gearboxes are bad. Harmonic drives, cycloidal drives, planetary gears, belts, ball screws, and other mechanisms exist because different robots need different mixtures of compactness, torque, precision, efficiency, durability, noise, cost, and serviceability. The point is that transmission choice changes the feel of the machine. A robot that works near people or uncertain objects often needs more than position accuracy. It needs motion that can be controlled gracefully when the world pushes back.
Sensing the Joint
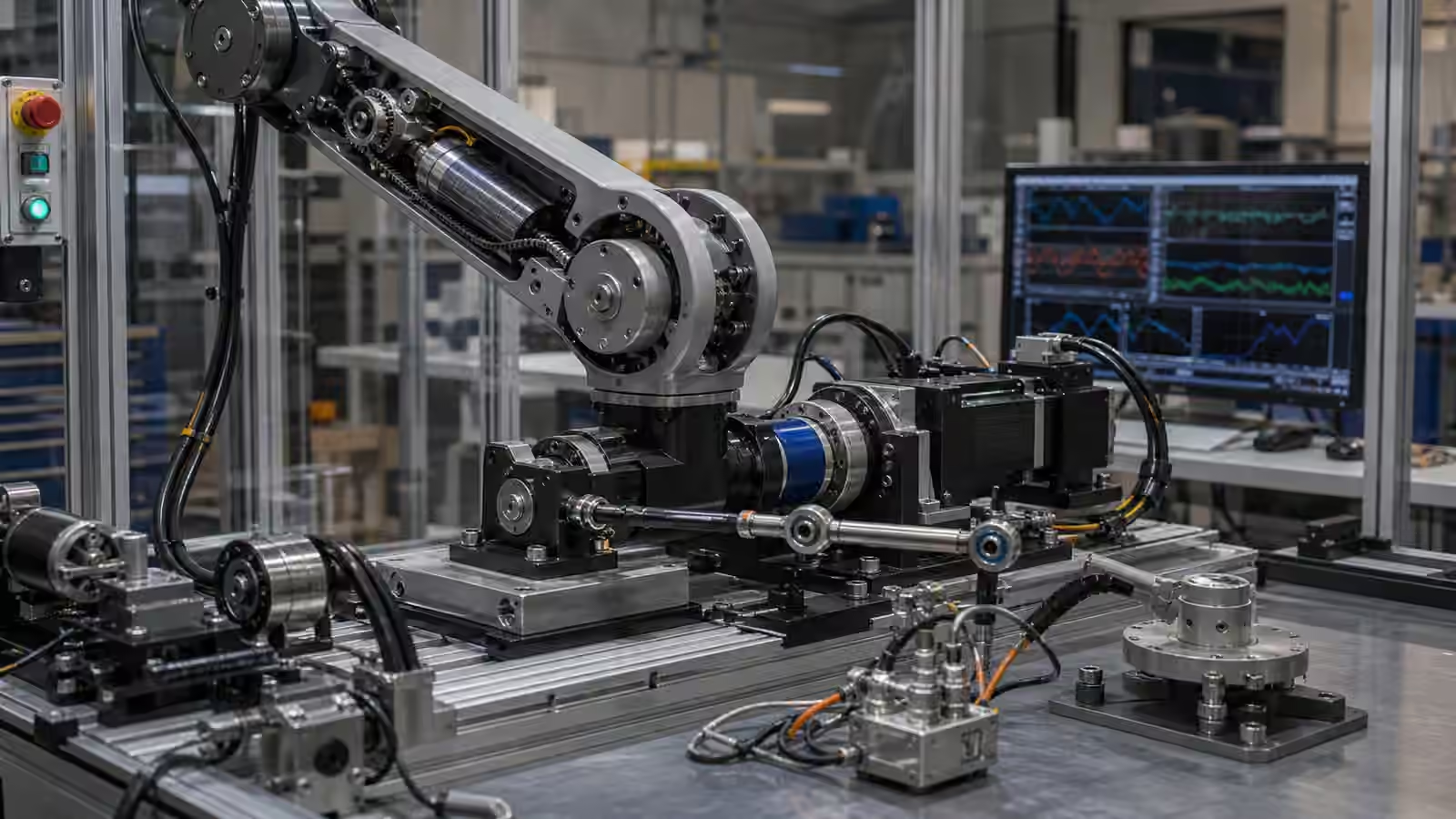
A controller cannot manage what it cannot observe. Robot joints commonly need position feedback, velocity estimates, motor current measurements, temperature readings, brake status, and sometimes torque or force sensing. A mobile base may also depend on wheel encoders, inertial measurements, and current draw to understand how the drive is behaving. A hand may add tactile pads, fingertip force, or tendon tension. These measurements do not make the actuator intelligent on their own, but they give the controller evidence.
The quality of that evidence matters. An encoder mounted on the motor side of a gearbox may know the motor’s rotation precisely while missing flex or backlash at the output. A torque estimate based on motor current may be useful in clean conditions and misleading when friction changes. A temperature sensor may protect a winding but tell little about a hot gearbox casing. A brake sensor may confirm that a brake was commanded, not that the load is actually safe. Robotics is full of measurements that are helpful when their limits are understood.
This is where actuator sensing meets Robot Calibration and Alignment . The controller needs to know not only that a joint moved, but how that motion relates to the robot’s body, tool, payload, map, and task. If the joint angle, tool center point, force signal, and camera estimate do not describe the same physical situation, the robot can look well instrumented while acting poorly.
Control Loops Are the Inner Reflexes
High-level autonomy decides what the robot is trying to do. Motion control decides how the body gets there. A planner may choose a path for an arm, a walking gait, a docking approach, or a route through a warehouse. The lower-level controllers then send commands many times per second to motors and brakes, comparing desired motion with measured motion and adjusting the response.
The controller may be trying to hold a position, follow a velocity, limit torque, maintain balance, cushion contact, or behave like a virtual spring. These modes are not interchangeable. A stiff position controller can be excellent for a machine tool and dangerous around a person. A compliant controller can be gentle around contact but may feel vague if the task needs precise insertion. A torque controller can make a joint responsive to force, but only if sensing, bandwidth, and mechanical design support it. Motion control is the point where elegant planning becomes bodily behavior.
This is why the Autonomy Stack should not be imagined as software floating above hardware. Planning, control, and actuation constrain one another. A navigation system can request a smooth stop, but the base must brake cleanly on the actual floor. A grasp planner can ask for a delicate closure, but the fingers need enough sensing and controllability to avoid crushing or dropping the object. A humanoid policy can ask for a recovery step, but the ankle and knee actuators must produce the correction before balance is lost.
Compliance Is a Design Choice
Real environments push back. A gripper touches a carton that flexes. A mobile robot wheel hits a floor lip. A leg meets the ground earlier than expected. A human nudges a collaborative arm. A drawer resists opening because it is slightly misaligned. In these moments, the robot needs some relationship between command and contact that is neither limp nor brutally rigid.
Compliance can come from mechanical design, such as springs, soft pads, flexible mounts, or series elastic elements. It can also come from control, where the actuator is commanded to yield in a measured way when force rises. The best answer depends on the job. A robot carrying heavy pallets needs firm control and predictable braking. A robot hand handling produce or folded fabric needs a much gentler response. A humanoid walking through human spaces needs joints that can handle impact and surprise without turning every bump into a crisis.
Safety discussions often focus on sensors and protective stops, and those are important. But safe behavior also lives in the actuator. How quickly can the joint stop? What happens if power is lost? Does the arm fall, hold, or drift? Can a person backdrive it? Does a software fault leave the motor energized? Can the brake hold the payload? The answers are physical. They determine whether a safe state is actually safe.
Heat Is a Deployment Constraint
Heat is one of the least glamorous limits in robotics. Motors heat under load. Drivers heat when pushing current. Gearboxes warm through friction. Batteries heat during heavy draw and charging. Housings trap or release that heat depending on design. A robot can look fully capable for five minutes and become constrained after an hour.
This matters because deployments are made of duty cycles, not highlight moments. A picking arm may need pauses. A mobile robot may need charging windows. A humanoid may need to limit certain motions because the joints are packed tightly inside a body with little room for cooling. The control system may quietly reduce speed or torque to protect hardware, which changes throughput and user expectations. If a site plans work around the demo pace instead of the thermal pace, disappointment arrives quickly.
Heat also complicates diagnosis. A robot that misses picks late in a shift may have a perception issue, a worn gripper, a calibration drift, or a joint that behaves differently when warm. A base that docks poorly after heavy use may be seeing battery sag, wheel wear, or controller limits. The hardware and software symptoms are intertwined, which is why good Robot Data Collection includes motor currents, temperatures, faults, interventions, and timing rather than only video.
Motion Quality Is Part of Trust
People read robots through motion. A robot that accelerates harshly, jitters near a person, drops into stops, or hesitates without explanation feels unreliable even if the task eventually completes. A robot that moves calmly, leaves margin, reacts consistently to contact, and recovers without drama feels more like equipment. That impression is not cosmetic. It reflects the quality of sensing, control, mechanical design, safety margins, and field tuning.
Motion quality also affects the people who work near the robot. A mobile robot with smooth braking is easier to share an aisle with. An arm that approaches a handoff point predictably is easier to trust. A home robot that nudges furniture aggressively teaches the owner to doubt it. A humanoid that makes sudden balance corrections near people has a social problem before it has a sales problem. Physical AI is not judged only by task completion. It is judged by what the machine makes nearby humans prepare for.
The practical lesson is simple: do not separate intelligence from movement. The robot’s plan may be clever, but the actuator makes it real. A capable physical AI system needs models that understand the task, sensors that describe the world, calibration that keeps geometry honest, and actuators that can deliver controlled force through time. When those pieces agree, the robot seems calmer than its complexity. When they disagree, even a good plan can become a bad motion.
The next time a robot demo looks effortless, watch the joints. Notice the starts and stops, the way contact is handled, the payload margin, the heat implied by repeated work, and the recovery when motion is imperfect. The motors are not background machinery. They are where the promise of physical AI meets the weight of the world.


